When I started doing bodywork it didn’t take long before I began to realize that there was a significant correlation between how my clients sit, stand, and move and their complaints. Early in my practice, educating clients on stance and gait ergonomics became part of my services. However, because my clients lead busy lives, embodying this information has not always been straightforward, which led me to the idea that feedback dynamically informing the user of their stance/gait status would be helpful.
Pressure Sensors
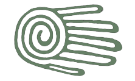
Initially, the premise was that this information could be captured by pressure sensors under the feet. Pressure sensing mats are used in physical Therapy for gait analysis, so why not just embed these sensors in an insole to dynamically feed back stance/gait pattern data with an alert calibrated off of a threshold? One version of the several prototypes I built for this purpose is pictured in the gallery below.

After some time experimenting with this apparatus1, a problem with using foot pressure readings became apparent: you are sensing the effect of gait patterns, not the cause, and you have to embed assumptions about causal origins to calibrate the feedback threshold values. Building out the edge case conditional logic for threshold triggering exponentially increased in complexity – with no end in sight and obvious embedded assumptions about “proper” stance/gait patterns.
I came to realize that the idea that pressure sensor data from foot strikes has limited utility for gait coaching. There is an apparent use case for diagnosing established gait pathologies, but not for dynamic feedback for gait optimization. (There may be a case for LLMs using this data for feedback.)
Acceleration Sensing
This led me to the question of whether there is a global metric, a derivative of stance/gait data underneath these pressure readings. From my study of using Tensegrity to model animal kinematics, it is apparent that a key quality of tensegrity is that loads are globally distributed, at any amplitude or frequency, minimizing shock. If tensegrity kinematics2 does factor into animal morphology this should be visible within the rate of change and power spectrum in acceleration data while moving.
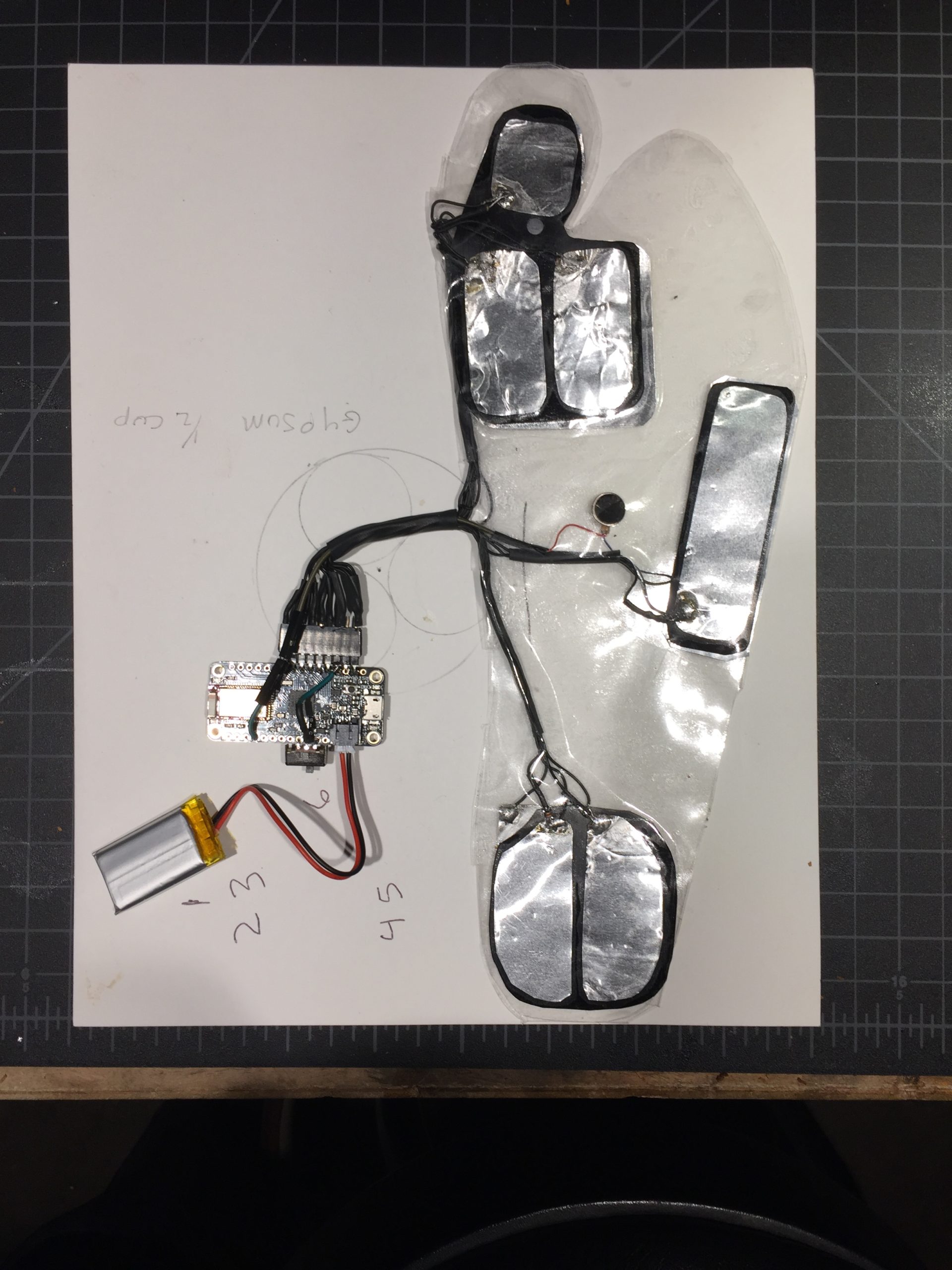
This started me on the path of evaluating movement by capturing acceleration data. Early versions of this study used the equipment I built in the pictures below. With experimentation, I found that sensing at the Manubrium3 provides the largest range of values for the same range of gait patterns. When experimenting with Inertial Measurement Units (IMUs), it quickly becomes apparent that you are looking at the organism’s response to the gravitational effect4 which is itself acceleration. I began to concurrently acquire a deeper understanding of the nature of this effect.


Although the characteristics of variance in gait patterns are visible in plots of the raw acceleration data, when the 1st and 2nd derivatives of this data are plotted variances jump out and are easy to configure as a feedback threshold. Running the data through a Fast Fourier Transform reveals a variance in the median frequency of the power spectrum relative to gait patterns. Acquiring this processed data was made exponentially simpler by ChatGPT. This post discusses the results of this study:
A COMPREHENSIVE DESCRIPTION OF GAIT
and has led to initiating this study of the efficacy of Manual Therapy using these metrics:
THERAPEUTIC EFFICACY STUDY
From this work, I went on to develop a Smartphone App that opened access for iPhone users to these metrics of gait efficacy. This can either be used as a gait training tool or as a game. It is a unique form of quite aggressive exercise. There is a post discussing this app here:
SPRIKE: A GAIT TRAINING APP
The fifteen years or so that I have studied this has been an interesting journey that began with analyzing how the foot pushes against the ground while standing and moving, to analyzing how the organism holistically integrates the third and fourth derivatives of stance(position) while moving. My perspective has shifted from an idea of minimizing emergent pathologies to the possibility of a tool for guiding movement optimization to the limits of the integrative potential of the organism within the gravitational effect.
FOOTNOTES
- Finding a pressure sensor that would hold up to the strain of being inserted into an insole was a challenge. If you want to experiment with stance/gait pressure data I recommend to CNC your variant of this pattern in bare PCB or order from a PCB manufacturer, and use a layer of conductive foam. This gives a pretty good analog gradient for <$1.00/Sensor: PATTERN
- There is a post on Tensegrity Kinematics here:
TENSEGRITY KINEMATICS - There are posts discussing attributes of the Manubrium here:
MANIPULATION CORE - There are posts on Gravity here:
GRAVITY
{kind=link}